 Россия
Россия

Коптильный комплекс на базе Arduino. Шаг 7 Заслонки
Автор:
ДКР
,
23 November 2017
·
8695 просмотров
Следующая группа оборудования требующая управления контроллером - Приводы заслонок.
На практике с Ардуиной используют два типа исполнительных механизмов:
Управлять буду с помощью шаговых двигателей через драйвер. Это простое и дешевое решение. Можно выдрать движки из старых принтеров или в крайнем случае купить. Драйвера - А4988 , средняя цена 50 рублей.
, средняя цена 50 рублей.
Потребуется установка концевых выключателей для определения начального положения. В схеме я нарисовал обычные микро-выключатели, но я предпочитаю использовать готовые оптические модули. Например такие: . Последний раз их покупал по 53,5р.
. Последний раз их покупал по 53,5р.
Для максимальной конфигурации потребуется три привода.
Обвязка драйвера.
Каждый драйвер ШД подключается к контроллеру двумя проводами (используем два цифровых выхода). Дополнительно подключаем управление питанием драйвера. (один выход на все двигатели). Так как напор воздуха небольшой, само-разворачивание задвижек практически исключено. Необходимости держать двигатели в режиме удержания (на обмотки двигателя подано напряжение) нет. По этому после выполнения команды двигатель обесточиваем. Это снижает расход электро-энергии и уменьшает нагрев драйвера.
Схема подключения теперь выглядит так: (
( Термодатчики_bb.pdf (2.8 МБ)
Термодатчики_bb.pdf (2.8 МБ)
Скачано: 946)
На драйвере есть три контакта определяющие размер шага двигателя. На схеме они все замкнуты. Это условно ... выбор шага дело индивидуальное и зависит от типа ШД.
Тип ШД - любой, или почти любой но обязательно с двумя обмотками (4 провода). Возможно потребуется немного по-шаманить с подключением обмоток. Не всегда понятно где начало и конец. При неправильном включении двигатель не крутится а гудит.
Отдельная песня - регулировка тока на драйвере. Как видно на фото, там есть потенциометр (кружечек с крестиком). Поворачивая его отверткой по часовой стрелке мы увеличиваем ток обмоток. Для измерения тока используем вольтметр. Измеряя напряжение на отвертке можно судить от токе в обмотках. Я не буду вдаваться в подробности, но если нет документации по двигателю обычно устанавливаю минимально доступный ток при котором ШД стабильно отрабатывает команды.
Особенно хочу предупредить, что попытка вынуть драйвер или отключить двигатель при поданном питании - с большой вероятностью выведет из строя драйвер.
Как сделать механическую часть - описывать не буду. Тут полное творчество. Я лично использовал такие шиберы: по цене 659 рублей.
по цене 659 рублей.
Так как остались только релейные нагрузки (требуется только включение и выключение) Описывать больше нечего. Следующий шаг - промежуточный финал. Где я подведу итоги и опишу текущие возможности. На этом будет закончена часть сборки и можно будет заняться алгоритмами работы.
На практике с Ардуиной используют два типа исполнительных механизмов:
- Сервоприводы

- Шаговые двигатели


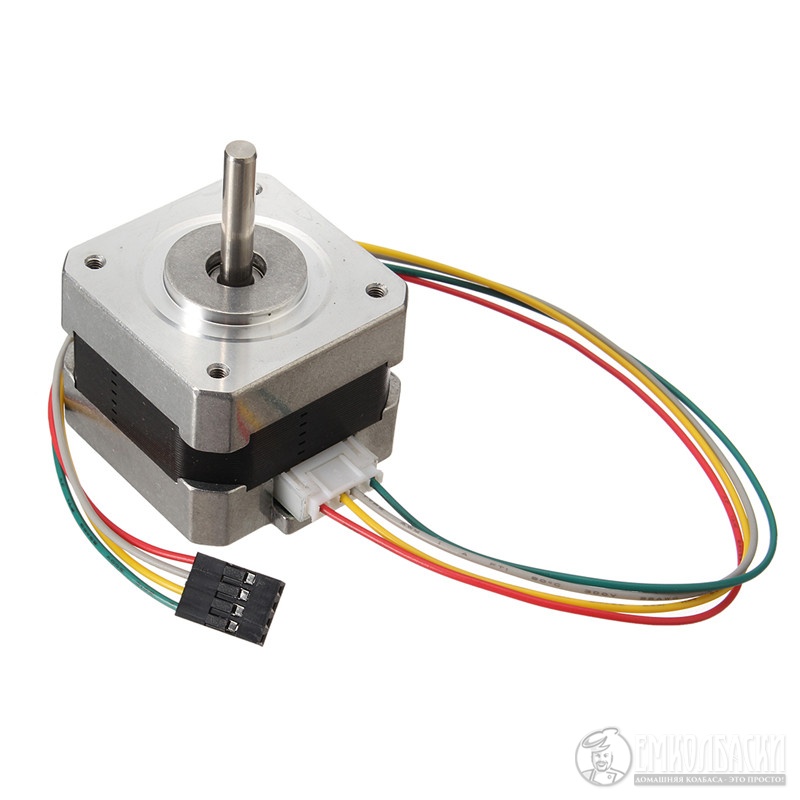
Управлять буду с помощью шаговых двигателей через драйвер. Это простое и дешевое решение. Можно выдрать движки из старых принтеров или в крайнем случае купить. Драйвера - А4988
 , средняя цена 50 рублей.
, средняя цена 50 рублей.Потребуется установка концевых выключателей для определения начального положения. В схеме я нарисовал обычные микро-выключатели, но я предпочитаю использовать готовые оптические модули. Например такие:
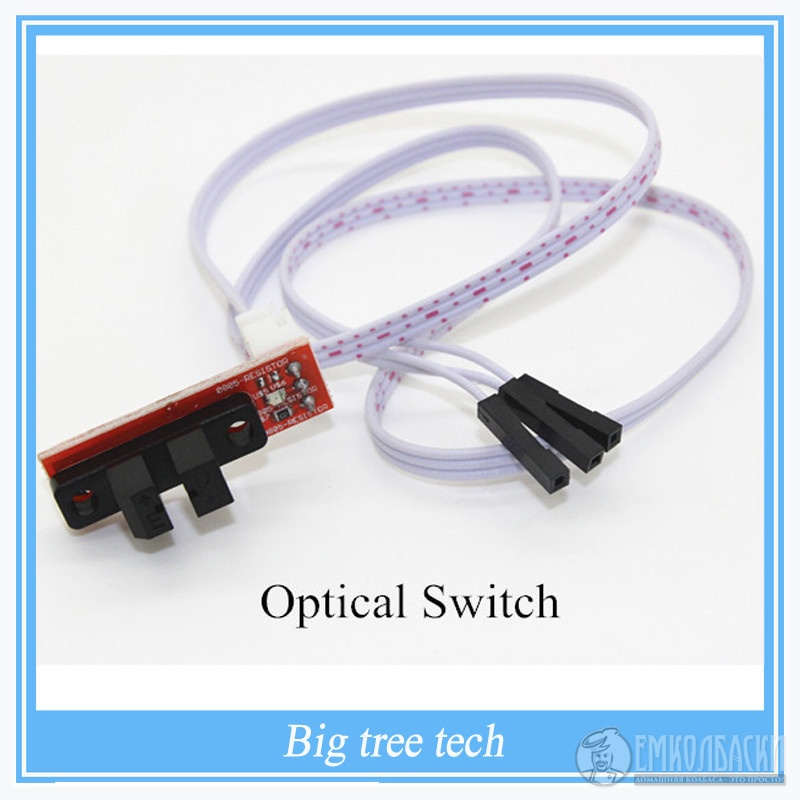 . Последний раз их покупал по 53,5р.
. Последний раз их покупал по 53,5р.Для максимальной конфигурации потребуется три привода.
- Привод заслонки на циркуляцию в камере
- Привод заслонки дымохода
- Привод заслонки поддувала
- Шаговый двигатель - 3 шт.
- Модуль концевого выключателя - 3 шт.
- Драйвер шагового двигателя с радиатором - 3 шт.
- Источник питания для двигателей 12 В 3А - 1шт. (при использовании компьютерного БП не требуется)
Обвязка драйвера.
Каждый драйвер ШД подключается к контроллеру двумя проводами (используем два цифровых выхода). Дополнительно подключаем управление питанием драйвера. (один выход на все двигатели). Так как напор воздуха небольшой, само-разворачивание задвижек практически исключено. Необходимости держать двигатели в режиме удержания (на обмотки двигателя подано напряжение) нет. По этому после выполнения команды двигатель обесточиваем. Это снижает расход электро-энергии и уменьшает нагрев драйвера.
Схема подключения теперь выглядит так:
 (
Термодатчики_bb.pdf (2.8 МБ)
(
Термодатчики_bb.pdf (2.8 МБ)
Скачано: 946)
На драйвере есть три контакта определяющие размер шага двигателя. На схеме они все замкнуты. Это условно ... выбор шага дело индивидуальное и зависит от типа ШД.
Тип ШД - любой, или почти любой но обязательно с двумя обмотками (4 провода). Возможно потребуется немного по-шаманить с подключением обмоток. Не всегда понятно где начало и конец. При неправильном включении двигатель не крутится а гудит.
Отдельная песня - регулировка тока на драйвере. Как видно на фото, там есть потенциометр (кружечек с крестиком). Поворачивая его отверткой по часовой стрелке мы увеличиваем ток обмоток. Для измерения тока используем вольтметр. Измеряя напряжение на отвертке можно судить от токе в обмотках. Я не буду вдаваться в подробности, но если нет документации по двигателю обычно устанавливаю минимально доступный ток при котором ШД стабильно отрабатывает команды.
Особенно хочу предупредить, что попытка вынуть драйвер или отключить двигатель при поданном питании - с большой вероятностью выведет из строя драйвер.
Как сделать механическую часть - описывать не буду. Тут полное творчество. Я лично использовал такие шиберы:
 по цене 659 рублей.
по цене 659 рублей.Так как остались только релейные нагрузки (требуется только включение и выключение) Описывать больше нечего. Следующий шаг - промежуточный финал. Где я подведу итоги и опишу текущие возможности. На этом будет закончена часть сборки и можно будет заняться алгоритмами работы.
- vash, Bizard2000, KOLBASERRO и 8 другим пользователям это нравится












Попытаюсь по порядку...
Если нужно увидеть все публикации на тему контроллера - http://www.emkolbask...og/28-kolduino/
Нет прямой связи шиберов и термодатчиков.. Есть универсальный контроллер который по нужной для данного продукта технологии управляет процессом. Это может быть: Варка, Жарка, Копчение, Сушка, Проветривание и.т.п... Все это со своими параметрами среды.
Что взять от контроллера - каждый решает сам... Кто-то только контроль параметров. А кто-то контроль + управление.
Тут на форуме я публиковал фото стекла на моей камере.. (из витринного холодильника) - Коптильня из холодильного шкафа С5G (пивного).. Так и вроде нормально у меня.. Пол года пользуюсь и еще не мыл ни разу.. Дым разный бывает.. Нам нужно копчение продукта а не копоть на нем..
Умрут датчики влажности... Если просто в дым сунуть.... Но тут опять повторю. Режимы разные, копчение один из них. Для копчения - влажность знать не обязательно, потому датчик закрывать экраном.. А если все таки хочется - используем вариант сухого и мокрого термометра.. Просто и надежно.. Контроллер позволяет любой вариант.. А уже пользователь решает как делать.
У меня один контроллер, и я его использую и в духовке, и при варке в воде, и в коптилке. И автомобиль недавно ремонтировал с ним... проверял систему охлаждения. А когда не готовлю он у меня как метеостанция стоит...